Paralelný robot
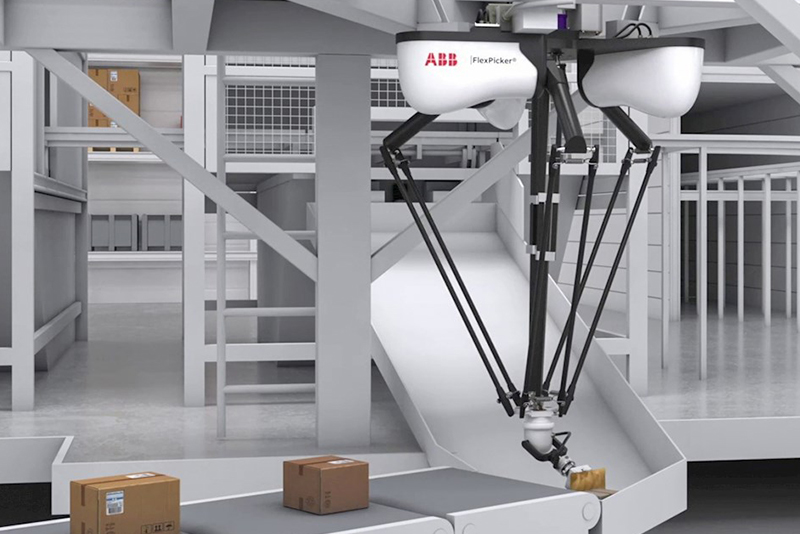
Paralelný robot je typ robotického systému, ktorý sa vyznačuje štruktúrou pozostávajúcou z viacerých mechanických ramien spojených súčasne na pevnom základe. Tieto ramená sú umiestnené paralelne voči sebe a sú poháňané aktuátormi, ktoré umožňujú ich presné a synchronizované pohyby.
Hlavnou vlastnosťou paralelných robotov je ich vysoká presnosť a stabilita. Tie ich robia vhodnými pre aplikácie, kde je potrebná rýchla a presná manipulácia objektov. Paralelné roboty sa často používajú v priemysle, napríklad v automobilovom odvetví pre zvýšenie efektivity v montážnych linkách alebo v lekárskej technike pre presné chirurgické zákroky.
Vďaka svojej paralelnej štruktúre majú paralelné roboty obmedzený pracovný priestor. Avšak ich výhody v presnosti a rýchlosti robia z nich dôležitý nástroj pre určité aplikácie, ktoré vyžadujú vysokú presnosť a dynamiku.